Блог:Точка Росы
Блог с постами технической направленности, чтобы погордиться сделанной работой, и поделиться результатами исследований, сделанными в текущей рутине.
Если вы умеете пользоваться RSS/Atom агрегаторами — подписывайтесь!. По любым возникающим вопросам можно писать сюда.
Весь контент данного блога распространяется на условиях Creative Commons Attribution-ShareAlike 3.0 License (CC-BY-SA)
RaceHound 1.0 - ещё раз о «гонках» в ядре

Недавно вышла версия 1.0 системы RaceHound для поиска «состояний гонки» при обращениях к данным в ядре Linux.
Если говорить простым языком, такие «состояния гонки» — это когда к данной области памяти разные потоки выполнения в программе (или, скажем, в ядре) могут обращаться одновременно, причём хотя бы один из потоков выполнения меняет содержимое этой области памяти. Такие ситуации могут приводить к очень неприятным последствиям, но выявить их бывает очень непросто.
В этом, например, может помочь инструмент KernelStrider. Он находит много потенциальных «гонок», но у него могут быть и ложные срабатывания, то есть бывает, что он сообщает о «гонке», которой нет.
RaceHound же, наоборот, может многое «не заметить», но если он выявил «гонку» — та, действительно, происходит. Кстати, эти инструменты хорошо работают в паре: KernelStrider выявляет потенциальные «гонки», а RaceHound проверяет, действительно ли эти «гонки» происходят.
В частности, таким образом удалось недавно выявить интересную «гонку» в драйвере «uvcvideo» (работа с web-камерой) из ядра 4.1-rc5. Правда, разработчики этого драйвера уверяют, что ничего страшного из-за этой гонки произойти не может, но всё же.
Принцип работы RaceHound очень прост.
- Ставим программную точку прерывания, ПТП, (наподобие того, как это делают отладчики) на те инструкции в коде, которые могут участвовать в «гонке».
- Когда какая-то из ПТП срабатывает, выясняем, к каким данным в памяти соотв. инструкция собирается обратиться, то есть находим их адрес и размер.
- Ставим аппаратные точки прерывания на эту область памяти.
- Делаем небольшую задержку. Если в это время кто-то обратится к этой области памяти, аппаратные точки прерывания сработают — «гонка» выявлена.
- Убираем аппаратные точки прерывания, затем даём возможность той инструкции, для которой выше сработала ПТП, выполняться дальше.
Разумеется, «дьявол — в деталях» и реализовать такой алгоритм на практике оказалось очень и очень непросто. Не зря работа над RaceHound ведётся с лета 2012 года.
По сравнению с предыдущими версиями (0.x), в версии 1.0 наши специалисты существенно переработали основные компоненты RaceHound. Раньше можно было использовать его только для одного выбранного модуля ядра. Теперь же — для произвольного кода как в самом ядре, так и в модулях, для любого участка кода, куда можно поставить программную точку прерывания.
Кстати, при подготовке этой версии была найдена и исправлена ошибка в механизме работы с точками прерывания (точнее, с т. н. Kprobes) в самом ядре. Исправление должно войти в версию ядра 4.1.
Фотографии устройств в базе оборудования
Мы начали прикрепление изображений на страницы протестированных компьютеров и отдельных устройств в нашей базе поддерживаемого оборудования. Пока изображений не очень много, но мы надеемся, что с помощью нашего мощного сообщества мы сможем сделать базу более яркой и наглядной.
Теперь при создании пробы компьютера вы можете дополнительно передать его фотографию или фотографии отдельных устройств (видеокарты, материнские платы, принтеры и т.д.) и мы непременно добавим их в базу. Сделать это можно в специальной теме на нашем форуме или в социальной сети ВКонтакте. Загружайте только сделанные вами лично фотографии.
Фотография устройства будет отображаться только на странице этого устройства (пример: диск SanDisk SSD U110 16GB). Фотография же компьютера будет отображаться не только на странице этого компьютера, но и во всех его пробах (пример: ноутбук ASUS A3L).

Массовое тестирование WiFi карт
Помимо множества ноутбуков и десктопов с разнообразными конфигурациями в нашей тестовой лаборатории есть еще и склад отдельных компонентов (видеокарты, мониторы, сетевые карты и т.д.), которые мы тестируем отдельно на тестовых стендах. Некоторое время назад склад пополнился пакетом из нескольких сот разнообразных WiFi карт. И, наконец, мы закончили тестирование этих карт.
Изначально тестирование было начато еще на старой платформе R3 и затем продолжено на R5. Большую часть карт составляли карты формфактора Mini PCI-E и Mini PCI-E Half-Size, но был и десяток старых Mini PCI. После классификации и выявления дубликатов был составлен каталог из 69 различных моделей карт. Производителями карт были: Atheros (30), Broadcom (21), Realtek (9), Intel (6) и Ralink (3). Тестирование производилось на двух наших тестовых стендах (1, 2) с помощью специальных переходников для таких карт на порты PCI-E и PCI соответственно.
Надо понимать, что 69 протестированных карт - это несколько сот (а может и тысяч) охваченных моделей ноутбуков, в которых эти карты используются, так как одна и та же карта может использоваться в нескольких десятках разных ноутбуков различных производителей.
В результате тестирования было выявлено и исправлено с десяток проблем. Все проблемные карты были отмечены в нашей базе данных оборудования. Большой вклад в тестирование WiFi карт внесли и наши пользователи, которые сделали пробы своих компьютеров. Ими было протестировано еще 165 различных моделей карт.
Самая популярный производитель WiFi карт на компьютерах наших пользователей — Atheros (AR9285 и AR9485). За ними идут, по убыванию популярности, Broadcom, Intel, Realtek и Ralink. Самые беспроблемные карты — Atheros и Intel. Больше всего проблем было выявлено с картами Broadcom. Для некоторых карт Realtek (например, RTL8723BE) нужно обновить ядро.
Найти нужную WiFi карту или любое другое интересующее вас устройство и посмотреть его статус поддержки можно с помощью поиска. Но лучше сделать пробу вашего компьютера и перейти на страницу карты из списка устройств в пробе. Так заодно можно проверить и другие устройства на компьютере.

WiFi карты
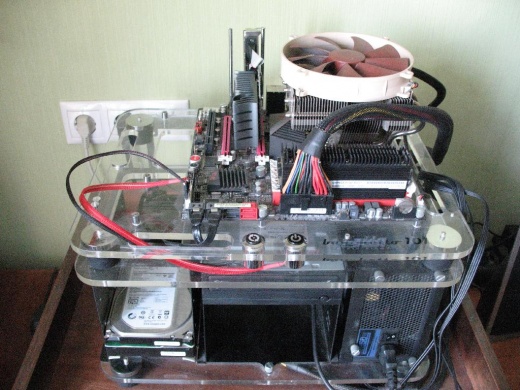
Тестовый стенд
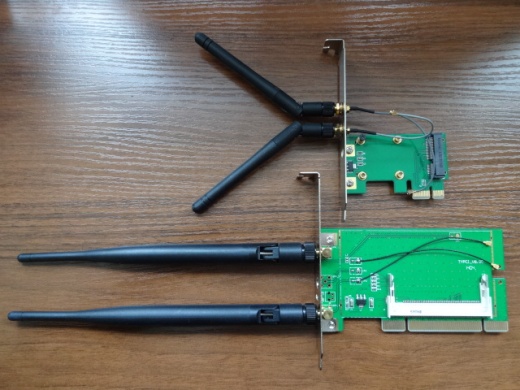
Адаптеры на PCI-E и PCI
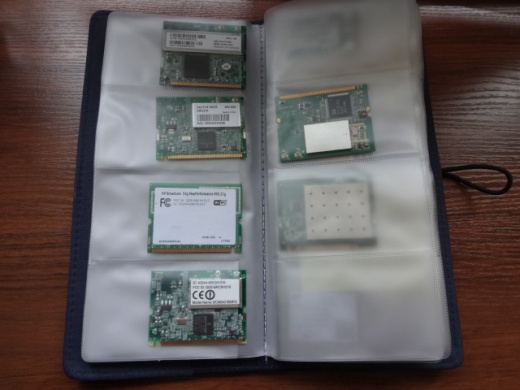
Каталог карт




Точка Росы №10

Пришло время для очередного дайджеста «Точки РОСЫ», ведь с момента предыдущего прошел уже год.
Да, в прошлом выпуске мы спрашивали, с какой периодичностью выпускать наш журнал-дайджест, и там лидировали варианты «еженедельно» и «ежемесячно». Но, понятное дело, это неразумно — ведь за неделю у нас может и вовсе не быть ни одной новости, хотя может и несколько — ну для этого у нас есть и этот блог, на который можно подписаться и классически — по RSS/Atom, или через социальные сети — VK, FB, недавно заведенная официальная страница компании в G+ и давно самозародившееся неофициальное сообщество в G+.
А дайджесты и PDF-сборки статей интересны наверное тем, кто не сильно заинтересован в нашей работе, но изредка готов, без лишних переходов по гиперссылкам, возможно даже от отчаяния (интернета нет, но есть недочитанный PDF-файл), полистать его, чтобы ознакомится с нашей работой, и сложно сказать, с какой частотой их надо выпускать… но наверняка, о должен содержать не меньше десятка статей, с другой стороны, если больше ста страниц, то наверняка уже можно.
Исторически, именно PDF-файлами мы начинали публиковать «Точку Росы» на опеннете и ЛОРе, но с публикацией в там есть некоторые проблемы: почему-то начинается обсуждение, касающееся чего угодно — обложки, личного мнения о сотрудниках и нашей работе, о политике… обо всем, кроме собственно, содержания. Поэтому мы там точно не очень хотим там часто «светиться», чтобы не надоедать, и не раздражать собравшуюся публику.
Впрочем, наверно надо разделять вопрос о нужности PDF-дайджестов и публикации на ЛОР и opennet. Наверное, надо спросить именно об этом:
Нужно ли публиковать изредка (год/полгода) сборки «Точки РОСЫ» на LORe
|
Нужно ли публиковать изредка (год/полгода) сборки «Точки РОСЫ» на OpenNet-е.
|
Итак, перейдем собственно к журналу. Как обычно, это будет и вебжурнал в формате «подборка статей с обложкой», так и так и в олдскульном PDF-файле c сотней страниц.
В любом случае — «многобукф», 250K знаков, почти две сотни страниц.
Итак, в десятом выпуске «Точки РОСЫ»:
Rex - управляем множеством машин с помощью SSH и Perl
В статье про групповые политики для Chromium в Linux мы упомянули, что json-файлы с политиками Chromium можно распространить по большому количеству машин с помощью программ управления конфигурацией типа Puppet или CFEngine. Но многие сисадмины считают эти программы слишком монструозными для подобных задач и предпочитают раздачу файлов по старому доброму SSH. Однако чтобы раздать файл множеству машин, придется уже написать небольшой скрипт на Shell. А поскольку раздача файлов — явно не единственная задача, которую захочется выполнить таким образом, то со временем у вас накопится куча Shell-скриптов, которая имеет тенденцию превращаться в свалку.
К счастью, имеются инструменты для более изящного использования SSH при выполнении задач на всех подвластных машинах. Одно из таких средств — это Rex. Никаких агентов на клиентских машинах, никаких сложных настроек — просто скрипты, выполняющие задаче на множестве компьютеров. Скрипты пишутся на языке Perl, но знать этот язык для выполнения большинства операций не обязательно. Rex предоставляет богатую библиотеку функций для выполнения типичных задач (копирования файлов, получения информации о системе и так далее), так что обычно скрипты умещаются в десяток строчек.
В этом году Rex перевалил за версию 1.0 и считается теперь вполне стабильным и надежным. А начиная с релиза 0.55.0, Rex официально поддерживает РОСУ (не без нашей помощи — в свое время мы делали обзор Rex для журнала «Системный администратор», было бы странно при этом не добавить в Rex поддержку наших дистрибутивов).
В ROSA Desktop Fresh пакет Rex уже есть в репозиториях и можно его установить через urpmi:
# urpmi Rex
А самую свежую версию всегда можно установить с сайта разработчика в одну команду:
# curl -L get.rexify.org | perl - --sudo -n Rex
Для совсем простых задач можно даже не писать скрипты, а командовать Rex прямо из консоли. Например, вот так можно скопировать файл test_policy.json в директорию /etc/chromium/policies/managed на машинах с именами client0, client1, … client10:
# rex -H client[0..10] -e 'upload "test_policy.json", "/etc/chromium/policies/managed"'
Поскольку Rex общается с клиентскими машинами по SSH, то на каждой машине должен быть запущен SSH-сервер, а программе необходимо передать логин и пароль для доступа (а лучше использовать авторизацию по ключу, чтобы не вводить пароль каждый раз).
Можно описывать задачи в скриптах. Например, создадим файл следующего содержания и назовем его Rexfile (Rex по умолчанию ищет файл с таким именем в текущей директории, так что можно его не указывать в параметрах вызова):
user "your_user"; password "your_password"; task "get_os", "localhost", sub { say get_operating_system(); };
Здесь мы определили задачу get_os, которая будет выполняться на нашей локальной машине («localhost») и будет печатать нам имя операционной системы. В начале файлы необходимо задать имя и пароль (либо ключ) для доступа к целевым машинам.
Теперь запустим Rex, приказав ему выполнить задачу get_os (и подавив вывод излишней информации с помощью опции -q):
$ rex -q get_os RosaDesktopEnterprise
Как видим, в качестве имени ОС Rex извлек значение DISTRIB_ID из файла /etc/lsb-release (которое также можно получить, выполнив команду lsb_release -i).
В одном файле можно описывать несколько задач, а каждую задачу можно ассоциировать с множеством машин. Вовсе не обязательно ограничиваться копированием файлов и «игрушечными» задачами. Возможностей у Rex довольно много — можно управлять пакетами, сервисами, всевозможными настройками клиентских машин, проводить инвентаризацию оборудования и даже управлять облаками. Познакомиться со всеми этими возможностями можно разделе документации на сайте разработчика. Но учтите — в отличие от простых задач, более сложные могут потребовать написания более сложных скриптов на Perl, так что перлоненавистникам этот подход вряд ли понравится.
ROSA Enterprise Desktop X2
Представляем ROSA Enterprise Desktop X2 — новую версию операционной системы для корпоративного сектора. В состав дистрибутива входит прикладное программное обеспечение, решающее большинство типовых задач: многофункциональный офисный пакет, интернет-браузер, программы для работы с электронной почтой, обмена мгновенными сообщениями, просмотра и редактирования аудио- и видеофайлов и многое другое.
Дистрибутив основан на ROSA Desktop Fresh KDE, но предоставляет дополнительные гарантии стабильности — обновления, не являющиеся исправлениями уязвимостей и критических ошибок, попадают в ROSA Enterprise Desktop X2 только после тщательного тестирования и «обкатки» в ROSA Desktop Fresh.
Если вы хотите приобрести данную систему или получить ее установочный образ для внутреннего тестирования, вам необходимо связаться с нашим отделом продаж. Детали можно найти на нашем сайте.
Приглашаем на ProfsoUX-2015 в Питере
В ближайшую субботу в Питере пройдет ProfsoUX-2015 — динамичная конференция по юзабилити, UX (User eXperience), всем остальным смежным темам — проектной и продуктовой аналитике, тестированию и геймификации использования, крутым инструментам и эффективным процессам для всего этого.
Организуют конференцию сами эксперты из индустрии, т.е. там нет занудных академических докладов, дипломов студентов — только практика, только хардкор, только состоявшиеся профессионалы, рассказывают о самом bleeding edge дизайнерских трендов, новых, неведомых интерфейсов взаимодействия, живодерских методов экспериментов над пользователями и другими вкусными вещами.
Доклады будут хорошо подготовлены — там многоуровневый отбор, удаленное рецензирование материалов и аудирование докладчиков, фигни быть не должно. Ну, по крайней мере, ее точно будет мало. Организаторы решили улучшить качество, даже по сравнению с прошлыми годами — а оно и так было вполне отличным.
Причем, как известно, можно не разбираться в программировании и менеджменте, но каждый современный человек, пользователь продуктов и сервисов, всегда готов поговорить и поругаться на тему юзабилити — так что специальных знаний от слушателей не потребуется.
Плюс, это ведь не только доклады — это редчайшая возможность отловить людей, отвечающих за интерфейс ваших любимых продуктов и сервисов, и попытаться поправить мозги — либо им, либо себе. По-крайней мере, излить на них свою боль, идеи, закрыть, как говорится, гештальт — это многого стоит.
Интересно ведь не только слушать доклады (будут и живые мастер-классы, где можно будет потренироваться в проектировании и прототипировании чего-нибудь), а живьем отловить людей, отвечающих за качество, фичи, и проработанность массовых продуктов и сервисов, чтобы излить на них свою боль и идеи. Выяснить интересный инсайд, или наоборот, рассказать о своем продукте или сервисе.
Кроме того, в рамках конференции будут мощные мастер-классы и тренинги, на которых, из вас за день сделают профессионала. Ну, в смысле, наверно можно будет пройти собеседование куда-нибудь.
Мы, команда «РОСы», традиционно выступаем информационным партнером, снимаем видео докладов и публикуем обзоры конференции, так что если вы почему-то не в курсе — немедленно читайте:
- Blog:Точка_Росы/Обзор_юзабилити-конференции_ProfsoUX-2014
- Blog:Точка_Росы/ProfsoUX — юзабилити-конференция в SPB. Обзор ProfsoUX-2013, приглашение на ProfsoUX-2014
или сразу смотрите записи 2014 и 2013 годов.
Ну или хотя бы просмотрите пару-минутный ролик:
Что же касается нас, то от «НТЦ ИТ РОСА» будет несколько сотрудников UX Team, будет Стас Фомин — и нас тоже можно отловить нас можно отловить, и поговорить про развитие наших дистрибутивов и продуктов.
Как уже говорил, будем снимать видео, и может быть (как фишка ляжет), будет некоторая трансляция. Но не факт. И возможны совершенно разные факапы, так что если очень настроены что-то посмотреть — смотрите лично, ловите докладчика, задавайте вопросы.
Ну, а если совсем не можете быть в Питере, ну типа никак — ОК, тогда смотрите сотню докладов по юзабилити с разных конференций, с прошлых лет — и если у вас возникают интересные мысли, по просмотру доклада — не важно, критика или позитив, запишите их там в комментарии. Ведь темы практически не устаревают, очень хотелось бы, чтобы жизнь доклада продолжалась после конференции.
- Update
- Конференция прошла на ура, отличные доклады, дружелюбная атмосфера, wish you were here.
Мы уже обработали и опубликовали видео.
Вот обзорный ролик на пару минут:
А семь часов видеозаписей докладов — тут.
«НТЦ ИТ РОСА» 22 апреля на конференции «IT-fresh. Свежий взгляд на решение бизнес-задач»
На конференции «НТЦ ИТ РОСА» представит собственные программные решения для различных типов оборудования и продемонстрирует их работу в виртуальной среде.
IT-fresh — это яркое событие для ИТ-рынка Москвы, призванное познакомить Вас с российскими и зарубежными разработчиками программного обеспечения, чьи решения и технологии набирают популярность и станут стандартами уже в ближайшее время. Организатором мероприятия выступает компания «Аксофт».
Темы конференции:
- Азиатский взгляд на российский рынок СУБД.
- Роль и возможности свободного ПО в корпоративном сегменте.
- Все о web-приложениях — от разработки и интеграции до защиты и администрирования.
- Какие изменения и тенденции? Новые вендоры: готов ли рынок и игроки меняться в условиях кризиса?
- Новые направления в ИТ и тенденции их развития в ближайшие несколько лет.
Участникам IT-fresh известный российский разработчик представит ROSA Enterprise Desktop (RED) и ROSA Enterprise Linux Server (RELS), предназначенные для оснащения рабочих мест и серверов без специальных требований по информационной безопасности. Доработка, обновление и поддержка этих продуктов ведется на территории РФ и не зависит от зарубежных поставщиков, позволяя использовать их для импортозамещения и обеспечения технологической независимости получаемых на их основе решений.
ROSA Enterprise Desktop (RED) — операционная система для рабочих станций. Дистрибутив основан на независимой кодовой базе, прошедшей сборку в среде полного цикла ROSA ABF. Система построена по принципу «одна задача» — «одно приложение» и рекомендуется к применению в корпоративной среде. Включает из коробки" полный набор приложений для того, чтобы начать работу сразу после установки: почтовый клиент, браузер, офисный пакет, клиент быстрого обмена сообщениями.
ROSA Enterprise Linux Server (RELS) — операционная система для построения серверных решений. RELS совместим с популярными свободными и коммерческими приложениями уровня предприятия, в том числе на бинарном уровне. В основу RELS положены исходные тексты Enterprise Linux и Mandriva, дополненные фирменными инструментами для развёртывания частных облаков, а также для централизованного управления сетевыми ресурсами, разработанными «НТЦ ИТ РОСА». Является полностью открытым программным обеспечением, включает поддержку серверных аппаратных платформ и систем хранения, защищен от внешних угроз. При создании решения разработчиками учитывался опыт многолетней эксплуатации аналогичных открытых решений в Европе.
ROSA Enterprise Desktop (RED) и ROSA Enterprise Linux Server (RELS) технологически совместимы с сертифицированными продуктами производства ООО «НТЦ ИТ РОСА», что позволяет при необходимости повышать уровень защищенности путем легкой миграции на сертифицированные решения, а также строить инфраструктуру с разными контурами безопасности.
Приглашаем на ROSS 2015 — Russian Open Source Summit

Приглашаем посетить экспозицию «НТЦ ИТ РОСА» в рамках ROSS 2015.
Организатором Саммита традиционно выступает ведущий ИТ-еженедельник PC Week/RE. Ожидается, что в работе ROSS 2015 примут участие порядка 400 руководителей и специалистов из коммерческих компаний разных отраслей и госорганизаций.
ROSS 2015 призван осветить качественно новую роль Open Source как основного движителя развития современных информационных технологий в эпоху облаков, мобильности и социальных сетей.
Только идеология Open Source сегодня позволяет реализовать на практике концепцию универсальной технологической платформы, обеспечивающей интероперабельность информационных систем и сервисов различных производителей.
В качестве ярких примеров здесь можно привести Open Source проекты облачной операционной платформы OpenStack, программно-определяемых сетей (SDN), контейнерных технологий автоматизации развёртывания и управления приложениями в среде виртуализации (Docker, Rocket и др.).
Другим фокусом конференции станет анализ ситуации в области Open Source в России. Будут представлены новые отечественные открытые проекты, показана роль отечественных разработчиков в международных Open Source проектах.
«НТЦ ИТ РОСА» поделится опытом внедрения СПО в российских организациях.
Одной из ключевых тем станет обсуждение роли Open Source как механизма эффективного импортозамещения информационных технологий в условиях западных санкций и оптимизации корпоративного ИТ-бюджета.
В программе форума — доклады экспертов «НТЦ ИТ РОСА», консультирование и демонстрация защищенных программных продуктов российского производства.
На пленарном заседании представители органов государственной власти, ответственные за информатизацию, представят свои оценки состояния дел и перспектив государственной подержки Open Source. Ассоциация РАСПО представит новое коллективное видение сообщества отечественных компаний, занимающихся разработкой Open Source решений и их внедрением, путей развития Open Source в России.
Президент и генеральный конструктор «НТЦ ИТ РОСА» выступит с докладом на тему: «Технологическая независимость и международная кооперация: совместить нельзя изолироваться». В докладе будут раскрыты примеры организации крупных международных проектов разработки ПО по открытой модели «разделяемые затраты, общий результат» с анализом преимуществ и рисков, которые получают участники с различных точек зрения — технологической, финансовой, ресурсной, политической и др. В качестве основного вопроса будет рассмотрена возможность одновременного совмещения технологической независимости страны с международной кооперацией - как в рамках открытых проектов, так и с компаниями-производителями закрытых западных продуктов. Отдельно будет представлена на обсуждение идея Минсвязи по созданию «Российского фонда развития программного обеспечения» со схожей предполагаемой моделью работы.
- Подробная программа мероприятия: http://www.pcweek.ru/foss/conference/program/
ROSS 2015 состоится в Event-холле «ИнфоПространство» по адресу: г. Москва, 1-й Зачатьевский пер., д. 4, м. Кропоткинская, м. Парк Культуры. (См. схему проезда).
Начало регистрации — 9:30, начало конференции — 10:00, окончание — 18:00.
Для специалистов участие бесплатное при условии подтверждения от Оргкомитета. Регистрация на мероприятие: http://www.pcweek.ru/foss/conference/registration/
Если вы никогда раньше не были на ROSS, предлагаем вам наши обзоры прошлогодних ROSSов: 2013, 2014 и видеозаписи в нашей медиатеке: ROSS-2013, ROSS-2014.
Наш Pkgdiff используется на fossies.org
Недавно в популярном проекте Fossies.org начали использовать наш инструмент Pkgdiff для массового анализа изменений в исходных кодах тысяч (!) пакетов. На главной странице теперь есть раздел Fossies Diffs. Список проанализированных пакетов можно найти по ссылке.
Инструмент Pkgdiff был разработан в 2011 году для классификации и контроля изменений в пакетах при разработке дистрибутивов РОСЫ. В 2012 году после продолжительного внутреннего тестирования исходный код был открыт для сообщества и приобрел заметную популярность. Ранее среди известных проектов, использовавших этот инструмент, были Glibc и Stellarium.org.
В РОСЕ инструмент используется не только мэйнтейнерами пакетов, но и в нашем популярном сервисе Linux Upstream Tracker для визуального просмотра изменений в пакетах некоторых библиотек (например, OpenSSL).

На странице каждого пакета теперь есть ссылка на отчеты Pkgdiff ("Diffs report") рядом с отчетами Doxygen:

Список отчетов, к примеру, пакета mesa:

Отчеты pkgdiff для mesa, классификация файлов пакета:

Списки файлов в разных классах и коэффициенты изменений:

Визуализация изменений (с помощью wdiff, rfcdiff):

Новая версия HW Probe Tool 0.9
Мы выпустили новую версию 0.9 инструмента HW Probe Tool (пакет hw-probe) для сбора логов и характеристик компьютеров пользователей. С помощью этого инструмента пополняется база данных оборудования РОСЫ.
Новый пакет уже доступен в репозиториях и может быть обновлен командой:
sudo urpmi.update -a sudo urpmi hw-probe
В инструменте произошло 3 главных изменения.
Аналог групповых политик для Chromium в Linux
Традиционно большинство приложений в Linux имеют два уровня настроек — системный и пользовательский. Системные настройки обычно размещаются в директории /etc; они задаются администратором на подконтрольных ему машинах либо приходят вместе с пакетами дистрибутива. Если пользователю эти настройки не подходят, он их изменяет (обычно с помощью самого приложения). Измененные настройки сохраняются в его домашний каталог, не влияя на других пользователей машины. При этом пользовательские настройки обладают более высоким приоритетом, чем системные — исходя из того, что пользователю лучше знать, что ему нужно, а Linux — дружелюбная пользователю ОС (старается ей быть, по крайней мере).
Однако бывают ситуации, когда пользователю надо «дать по рукам» и запретить менять некоторые настройки. Такие ситуации могут возникнуть и на домашней машине (например, если дети добрались до компьютера), а уж в корпоративном секторе — это дело обычное. Причем корпоративным регламентом могут быть охвачены вполне безобидные, на первый взгляд, параметры — домашняя страница браузера или используемая им по умолчанию поисковая система.
Для таких случаев требуется еще одно звено в цепочке настроек, которое было бы системным по своей сути (в том плане, что распространялось на всех пользователей системы и могло модифицироваться только администратором), но при этом имело бы приоритет больший, чем настройки пользователя. В Windows в роли такого звена выступают групповые политики (GPO), обычно задаваемые администратором домена AD и распространяемые на членов домена. В Linux, несмотря на существенный подвижки в плане интеграции с AD, прямого аналога GPO нет.
По большому счету, это и не нужно для низкоуровневых системных настроек, которые может изменять только администратор — например, набора подключенных репозиториев дистрибутива, используемых DNS-серверов и тому подобного. Но что делать с приложениями, системные настройки которых пользователь может переопределить своими собственными? Есть и здесь свет в конце тоннеля. По крайней мере, для отдельных программ, разработчики которых в курсе потребностей корпоративного сектора и знают, что там используются ОС не только от MS. И хороший пример здесь — браузер Chromium. Пример выше с настройками веб-браузера приведен не зря — в случае с Chromium, параметры такого рода можно намертво зафиксировать на уровне системы так, что пользователи не смогут их перебить.
Реализована такая возможность в Chromium очень просто — здесь предусмотрен системный файл настроек, данные из которго имеют приоритет выше, чем настройки пользователя. По сложившейся терминологии, такие настройки называют «политиками». Политики Chromium описываются файлами формата json, находящимися в директории /etc/chromium/policies. Политики делятся на обязательные (лежат в папке /etc/chromium/policies/managed) и рекомендуемые (/etc/chromium/policies/recommended соответсвенно). Рекомендуемые политики — это практически обычные системные настройки, которые пользователь может переопределять. А вот обязательные политики — это то, что нам нужно.
Для примера давайте зададим что-нибудь — например, список сайтов, которые Chromium должен блокировать. Все действия нужно производить с правами root; также не забывайте следить, чтобы у обычных пользователей не было прав на запись в создаваемые файлы.
Для начала, создадим нужную папку, если ее еще нет:
# mkdir -p /etc/chromium/policies/managed
А внутри нее создадим файл test_policy.json со следующим содержимым:
{
"URLBlacklist": ["example.com", "enemy-site.com"],
}
А теперь закройте Chromium, если он уже работает, запустите его снова и попробуйте перейти на сайт example.com.

Всего через политики можно задать почти три сотни различных настроек, полный список которых можно найти на сайте Chromium. Также Google предоставляет архив с шаблонами политик, куда входит и json-файл для Linux с аннотированными именами политик и их возможными значениеями.
Список политик, используемых в данный момент броузером, можно получить по ссылке chrome://policy.
Как и прочие файлы конфигурации, json-файлы с политиками Chromium можно распространить по папкам /etc/chromium/policies целого парка машин с помощью Puppet, CFEngine и подобных программ управления конфигурацией.
Chromium — не единственный пример приложения, поддерживающий системные настройки, которые не могут быть переопределены пользователем. Например, OpenOffice уже много лет поддерживает такой функционал. Правда, там разработчики пошли немного другим путем и добавили возможность для каждой опции в системном конфигурационном файле указать атрибут finalized, который и означает, что значение «окончательное и переопределению не подлежит». В случае OOo такой подход вполне логичен — файлы конфигурации Open/LibreOffice (с расширением «.xcu») имеют формат XML, где каждое свойство задается отдельным элементом. Наличие дополнительного атрибута элемента в такую архитектуру хорошо вписывается. Правда, редактировать XML-файлы вручную — то еще удовольствие. На FOSDEM 2014 разработчики из Collabora демонстрировали на слайдах графическую программу для редактирования файла настроек LibreOffice, а заодно и инструмент RemoteRoot для удаленного управления множеством машин (в частности, для доставки на них пакетов и конфигураций LO) — еще одно приложение из серии Puppet & co. Однако пока что многие из представленных там возможностей можно посмотреть только в рамках слайдов. Так, на сайте «remoteroot.org» в разделе «Downloads» уже второй год красуется сообщение «Very soon, please be patient!».
База оборудования: теперь на русском
Встречайте базу оборудования РОСЫ на русском языке! Теперь можно изменить язык с английского на русский с помощью переключателя справа сверху на странице.
Изначально база проектировалась на английском языке для охвата наиболее широкой аудитории пользователей. И это было правильно, так как пробы своих компьютеров в итоге загружали не только пользователи из России, но и из Италии, Франции, Австрии, Германии, Казахстана, США, Украины, Польши, Бельгии и др. стран. Но все же абсолютное большинство проб своих компьютеров загрузили из России. Поэтому мы потрудились и перевели интерфейс базы на приятный глазу русский язык.
Интерфейс базы данных доступен, как обычно, по адресу: hw.rosalinux.ru.

Замечания по переводу пишите здесь в комментах, на форуме, на странице вконтакте или в нашей багзилле.
ROSA Desktop Fresh R5 GNOME
Вышел релиз «ROSA Desktop Fresh R5» с окружением рабочего стола GNOME. Это первый выпуск линейки десктопных систем ROSA Desktop Fresh с рабочим столом GNOME Shell, на платформе 2014.1.
- Скачать дистрибутив можно здесь
К окружению GNOME Shell отношение несколько неоднозначное. С одной стороны, это один из самых популярных рабочих столов, внешне, дизайном и функциональностью напоминающий различные версии MacOS. Он выполнен в духе «минималистичной эргономики» для большей концентрации пользователя на основных задачах, с фиксированным расположением компактных панелей и других интерфейсных элементов, в противовес подходу «абсолютно все можно перенастроить». Благодаря этому, он, например, очень удобен на небольших мониторах ноутбуков, где на счету каждый пиксель экранного пространства.
С другой стороны, это окружение несколько непривычно для привыкших к стилю «нижняя панель+кнопка пуск+меню» пользователей Windows и KDE. Мы, и не только мы[1], проводили юзабилити исследования, в которых наблюдали проблемы адаптации у новых пользователей GNOME Shell. «Непродвинутым» пользователям было сложно выполнять задания без ярлыков на рабочем столе и «красного крестика» закрытия окна, без понятной ассоциации файлов с приложениями. Для опытных пользователей, привыкших к Windows, проблема была в потере личной эффективности из-за несовместимости горячих клавиш, неудобства закладок файлового менеджера и других, не так очевидных проблем.
Поэтому мы реализовали и поддерживаем ряд доработок, улучшающих юзабилити и адаптацию как опытных, так и начинающих пользователей. Так, например, реализована поддержка горячих клавиш Windows с обучающей справкой. На рабочем столе у нас можно легко добавлять ярлыки запуска и одним кликом или хоткеем показывать этот стол с ярлыками, легче делать закладки и в файловом менеджере. Есть гномодоработки и для развлечений — только в нашем гноме можно смотреть видео с FTP-ресурсов. Этих доработок нами сделано немало, и мы внимательно отслеживаем реакцию пользователей — если они кому-то не понравились, отключаем или убираем их. Так в этом релизе мы отказались от «Трея в режиме Обзора[2]» и убрали режим GNOME Fallback для устаревших компьютеров и нетбуков.

По умолчанию устанавливается наше оформление[3]: кроме сотен профессионально отрисованных иконок, дизайн преследует рациональные эргономические цели:
- Это светлая тема построенная на мягких цветах и оттенках серого, возможно не так эффектна, как контрастные темы с темным фоном, но более эффективна для длительной работы.
- В этой теме виджеты GTK-приложений более компактны, и меньше визуального контраста с KDE-приложениями
- Вид окон более привычен для пользователей Windows — все стандартные кнопки управления окнами справа, и у активного окна всегда горит красным «крестик» закрытия. Да, все это — темы, расширения, патчи — приходится постоянно адаптировать к непрерывным изменениям GNOME Shell и фреймворка GTK, не всегда это удается идеально — так например, в GTK3 появились Client Side Decorations — собственные, нестандартные механизмы оформления окон [1], [2], и хотя мы адаптировали «наши классические кнопки» управления окном и для них, все это еще неидеально, и есть куда все улучшать.
Но разумеется, легко, через «Тонкие настройки» установить и стандартное оформление Adwaita, или поискать любую другую тему из сотен популярных, ну а обои можно сменить прямо из броузера.
Еще из наших интересных и оригинальных разработок, включенных в дистрибутив:
- ROSA Freeze — «заморозка» системы от любых изменений.
- Экранная рисовалка ScreenPen, так что можно рекомендовать этот дистрибутив не только любителям Mac-интерфейсов с качественными объемными иконками, но и владельцам ноутбуков с тачскрином и преподавателям.
Кроме собственно GNOME-доработок, в этот релиз R5 попало множество системных улучшений, часть из которых уже выпущено и проверено в релизах ROSA FRESH KDE R5 и ROSA FRESH LXDE R5.
По сравнению с прошлым релизом, появились
- загрузка в Secureboot-режиме, и множество других улучшений загрузчика, например установка в раздел и ссылки на grub-меню.
- обновленные версии ядра, X11 и Mesa, графических драйверов NVidia и AMD, и прикладного софта.
- автоматическое выполнение TRIM для SSD.
- добавлена поддержка систем с гибридной графикой Intel+AMD, новые версии XFdrake.
Перечислять версии прикладных и системных программ несколько излишне, заметим только
- Ядро — 3.14.33
- Systemd — 208
- GTK — 3.12
- GNOME Shell — 3.12
- Firefox — 36
- LibreOffice — 4.3.5
Впрочем, скорее всего, когда вы читаете эти строки, уже новые версии всего этого софта прошли автоматическое и ручное тестирование, и доступны в обновлениях.
- Минимальные системные требования
- 1024 Мб ОЗУ (рекомендуемый объем — 1536 Мб).
- Место на жёстком диске: 7 Гб HDD
- Очень желательна видеокарта не старше пятилетней давности — оконный менеджер при композитинге очень расчитывает на возможности видеокарт.
ROSA Fresh — это современная отечественная операционная система на основе GNU Linux, создаваемая сообществом и легально доступная всем желающим совершенно бесплатно и без регистрации. Исходные коды системы публикуются согласно лицензии GPL в собственной системе сборки ROSA — ABF. ROSA Fresh предназначена прежде всего для начинающих пользователей Linux. Она представляет собой готовое решение типовых задач домашнего пользователя:
- Просмотр интернет-страниц
- Создание текстовых документов, электронных таблиц и презентаций
- Просмотр видеофайлов и прослушивание музыки, в том числе онлайн
- Редактирование графических файлов, аудио- и видеозаписей
После установки система сразу готова к работе, а для ее настройки не требуются специальные знания.
Репозитории ROSA Fresh — одни из самых богатых, в них можно найти тысячи программ для решения самых разных задач.
Линейка ROSA Fresh разрабатывается с 2013 года и обновляется в соответствии с политикой выпуска.
Как обычно, мы ждем от вас жалоб и предложений. У нас есть группы в Facebook и VK. В Google Plus у нас есть и недавно заведенная официальная страница компании и небольшое сообщество.
Есть форум, на котором не только доброжелательные пользователи, но и постоянно дежурят наши разработчики и тестировщики.
Для опытных пользователей — классическая багзилла, ставьте баги прямо по этой ссылке.- ↑ См. например, университетское исследование с ментоскопами и пульсометрами — «Оценка эффективности мультипрограммной работы в современных Linux GUI»
- ↑ К тому же неутомимые гномеры вовсе решили в свежих версиях гнома отказаться от нижнего трея.
- ↑ Мы проводили опросы, оно нравится нашим пользователям.
Скромный GUI для ROSA Freeze
Одним из новшеств осенних релизов РОСЫ был инструмент ROSA Freeze[1], позволяющий «заморозить» вашу систему так, что все (почти:)) сделанные в ходе работы изменения автоматически уничтожаются после перезагрузки. Инструмент в использовании очень прост, однако работает только в командной строке, что нередко отпугивает пользователей. А многие его просто не найдут. Для упрощения жизни, мы сделали простенький графический интерфейс, который может включать и выключать режим заморозки. Специальных названий для графического интерфейса мы придумывать не стали, просто ищите и устанавливайте пакет rosa-freeze-ui. В командной строке можно использовать имя покороче — urpmi rfreeze-ui. После чего ищите «ROSA Freeze» в меню либо запускайте команду rfreeze-ui из консоли.
Помимо кнопок Вкл./Выкл., через графический интерфейс можно задать и параметры заморозки — что использовать для хранения измененных версий файлов и какие директории не замораживать (обратите внимание, что заморозка /home и директорий, располагающихся не на корневом разделе, не поддерживается).

Надеемся, что наличие GUI сделает использование ROSA Freeze проще. Главное — не забывайте о включенном режиме заморозки и не удивляйтесь, если после перезагрузки машины пропадут все сделанные вами изменения. А если вдруг у вас неожиданно появятся сообщения о том, что на диске закончилось место, хотя его вроде бы должно быть предостаточно — проверьте, не включен ли у вас режим заморозки с использованием tmpfs для хранения измененных файлов.
Как водится, код проекта открыт и доступен на ABF, предложения/замечания/патчи — welcome.- ↑ См. также доклад «Средства восстановления системы в ROSA Linux»
ROSA Cloud Connector - упрощаем связь с облаками
Как вы наверняка знаете, время от времени В РОСЕ случаются наплывы студентов из НИУ ВШЭ. Многие студенты проходят у нас двухнедельную практику, в рамках которых выполняют небольшие задания по сборке пакетов и созданию вспомогательных утилит для этого процесса (временами даже вполне полезные).
Помимо практики, некоторые студенты выполняют для нас более сложные задачи в рамках дисциплины «Командный проект». Обычно эти задачи относятся к инфраструктурным проектам и пользователям их результаты напрямую не видны, но в этом году есть исключение — утилита, получившая название «ROSA Cloud Connector».

Программа делает ровно то, что отражено в ее названии — подключает вашу машину к различным облакам, а точнее — к облачным хранилищам. Подключиться можно только при условии, что хранилище вообще поддерживает Linux. Если есть «родной» клиент (например, в случае Dropbox), то он будет скачан установлен. Если клиента нет, но поддерживается WebDAV, то будет облачное хранилище будет подсоединено с использованием этого протокола и вы можете лицезреть соответствующие директории в Dolphin, Nautilus и прочих файловых менеджерах. Все, что от вас потребуется — это логин/пароль соответствующего сервиса. Не надо изучать инструкции по монтированию WebDAV или скачиванию клиентов — программа все сделает за вас.
Чтобы заполучить программу в свою систему, достаточно поставить пакет rosa-cloud-connector. Убедитесь при этом, что у вас установлены вс обновления (особенно относящиеся к Qt5, на котором написана утилита). Далее ищите в меню программу rosa-cloud, либо просто запустите ее из командной строки.

Список хранилищ с поддержкой Linux невелик, и более того, имеет тенденцию сокращаться — за время работы над программой успело «умереть» два сервиса. Впрочем, возможно о каких-то сервисах мы не знаем — тогда просто сообщите нам об этом. Программа в этом плане хорошо расширяемая, добавить поддержку нового сервиса в нее совсем несложно. Возможно, именно с помощью ROSA Cloud Connector другие пользователи узнают о существовании еще одного облачного хранилища, которое можно использовать в Linux.
Текущую версию ROSA Cloud Connector не стоит рассматривать как идеальную (в конце концов, для ее авторов — это первый опыт программирования под Linux). Однако если к ней появится интерес, то мы готовы ее дорабатывать и улучшать.
Как всегда, помощь советом приветствуется, помощь патчами — тем более. Исходный код доступен на ABF, можно смело форкать, экспериментировать и слать Pull request’ы.
|
Порядок в шведской семье или ссылки в Grub-меню
Как мы уже писали, сейчас уже совершенно нормально держать даже на ноутбуке несколько систем, и мы всегда пытаемся сделать так, чтобы с РОСой это было удобно.
Правда если вариант с двумя системами («для игр и реальной жизни») прост и очевиден, то если держать на своем компьютере в порыве энтузиазма или по работе несколько линуксов, возникали юзабилити проблемы, из-за ответственности основной системы, поставляющей загрузчик, за загрузку всей остальной семейки:
- При обновлении ядра в каждом из этих линуксов нужно перегружаться в главную систему и запускать процесс обновления меню, чтобы подхватились новые ядра «дополнительных» систем. Причем процесс сканирования систем по разделам выполняется далеко не мгновенно и автоматизировать его при каждой загрузке было бы неправильно.
БардакМучительный беспорядок! - Пунктов меню становилось слишком много, ибо на каждый найденный линукс добавляется два пункта загрузки («Загрузка по умолчанию» и «Дополнительные опции»). И хотя одноуровневое меню при небольшом числе пунктов эргономичней вложенного, то начиная с четырех систем пунктов становилось больше классической формулы «5±2»… и тут бы уже хотелось иерархичности.
Соответственно, мы неоднократно получали пожелания — нельзя ли оставить дополнительные системы[1] в своих разделах, вместе с собственными загрузчиками и меню загрузки (тогда внутри своих разделов они бы обновлялись своими силами), а из главного меню загрузки GRUB-а делать только ссылки на эти меню?
Наконец-то мы сделали и это[2], и теперь РОСА отлично подходит[3] на роль старшей жены в гареме сестры в семье, которая заботится о порядке и надежной загрузке остальных.


Настройки ROSA Fresh KDE для Full HD мониторов
На рынке персональных компьютеров все больше появляется ноутбуков с разрешением монитора 1920 на 1080 точек (Full HD). На таких экранах помещается гораздо больше информации, чем на экранах с разрешением 1600x900 (HD+) или 1366x768 (HD) — можно уместить единовременно на экране несколько окон приложений или много строк и ячеек больших тиблиц. Однако при этом все иконки, текст и картинки слишком маленького размера. Это может быть неудобным для людей с плохим зрением или слишком напрягать глаза у работяг-программистов, проводящих по десять часов в день за компьютером.
Ситуацию не меняют даже экраны с большой диагональю 17.3 дюйма — размеры элементов все-равно слишком мелкие. Частично проблема в том, что современные компьютеры выпускают с широкоформатными экранами с отношением ширины и высоты 16:9, то есть экраны слишком широкие, но низкие. Из-за этого все элементы уменьшаются пропорционально высоте экрана. Ширина же экрана на размер элементов не влияет. Еще несколько лет назад выпускались экраны с отношением сторон 4:3 и 16:10, что обеспечивало достаточную высоту экрана для работы на больших разрешениях, но теперь такие экраны выпускать экономически невыгодно.
Казалось бы, почему на смартфонах с разрешением Full HD и такими маленькими экранами нет проблем с размерами элементов? Все из-за того, что приложения и операционные системы для мобильных устройств разрабатываются специально под устройство с заранее известным и фиксированным разрешением. В мире персональных «универсальных» компьютеров все иначе. Здесь заранее не известно, на какой компьютер и с какими характеристиками будет установлена операционная система. Поэтому по-умолчанию размер элементов устанавливается маленьким, чтобы по максимуму использовать преимущество экрана с высоким разрешением и освободить пространство рабочего стола.
В этой статье я расскажу, как настроить РОСУ для комфортной работы на экране с высоким разрешением.
Рассмотрим снимок экрана Full HD с настройками по-умолчанию:

А так выглядит Simple Welcome:

Размер текста везде очень маленький, слишком мелкие иконки в трее и с ними неудобно работать, особенно при использовании тачпада вместо мыши.
Рассмотрим два подхода для изменения размеров графических элементов.
ABF - новый бэкенд, новый дизайн и новые возможности
Как наверняка заметили пользователи ABF, у нашей системы сборки недавно сильно изменился внешний вид. Но вряд ли многие догадываются, что изменение дизайна — это не самоцель, а следствие серьезных изменений в структуре бэкенда ABF.
В частности, ABF теперь использует популярные фреймворки Bootstrap 3 и AngularJS. Переход на них был продиктован отнюдь не данью моде, а необходимостью избавиться от самописных наработок, перенеся тем самым ряд задач с разработчиков ABF на разработчиков фреймворков и позволив первым больше внимания уделять функционалу, связанному с непосредственными обязанностями ABF — разработкой и сборкой проектов под Linux. Подобная необходимость замены собственных велосипедов на стандартные решения рано или поздно встает перед многими проектами, и мы решили, что лучше с этим процессом не затягивать — пока все еще помнят, как все самописные вещи устроены и работают.
Процесс переезда на новые технологии занял более полугода, и в начале февраля мы сочли качество нового ABF достаточным для «выхода в свет» и представления широкой публике.

Визуальные изменения в интерфейсе серьезны, а глаз разработчиков за полгода общения с ним успел замылиться, поэтому новые идеи и комментарии от пользователей относительно внешнего вида приветствуются. Если у вас есть более-менее глобальные предложения, то лучше оформлять их в виде идей на страничке ABF Ideas, а сообщения о мелких недочетах лучше отправлять с помощью соответствующей формы на сайте.
Помните, что визуальные изменения дизайна — это только вершина айсберга, внутренности ABF также подверглись серьезной переработке. Несмотря на обилие внутренних тестов (мы придерживаемся принципов Behavior Driven Development и пишем тесты на RSpec), мы допускаем возможность наличия ряда ошибок и регрессий. К слову, за первый день эксплуатации нового ABF мы по запросам пользователей уже исправили проблемы с подключением контейнеров, пересозданием сборок, отправкой pull request’ов через веб-интерфейс, автоматическим выбором целевых репозиториев в некоторых специфических случаях и несколько других проблем, не смертельных с точки зрения функционала разработки и сборки, но неудобных и неприятных с точки зрения пользователя Web-интерфйеса.
Есть и несколько новых заметных изменений в новом интерфейсе ABF по сравнению с предыдущим:
- для времени и даты теперь предпочтительным является отображение абсолютного значения — 2014-06-10 14:02. Относительное значение отображается рядом, если позволяет место — 2014-06-10 14:02 (8 months ago);
- на странице Advisories появилась колонка с именем проекта — очень полезно, так как по тексту некоторых advisories сложно понять, к какому пакету/проекту они относятся;
- если проект является форком другого, то это будет отображено в меню на странице проекта:

- если в строке браузера ввести ссылку на несуществующий проект, то отобразится страница 404, но содержимое строки адреса очищено не будет (как это было в старом ABF, когда в строке адреса вы получали http://abf.io/404.html). Так что если вы ошиблись парой символов, то исправить это можно гораздо проще;
- при создании новой сборки содержимое колонки «Build for platform» динамически изменяется в зависимости от того, что выбрано в поле «Save to repository». Например, если мы собираем пакет для репозитория rosa2014.1/main, то ABF разрешит подключить только репозитории платформы rosa2014.1:

Наконец, главное нововведение в новом ABF — это проекты-алиасы («aliases»), имеющие общий Git-репозиторий. То есть теперь можно иметь два проекта vanya/old_project и petya/new_project с различными описаниями, владельцами, привязками к платформам/репозиториям и так далее, но с общим Git-репозиорием. Так что все изменения, которые происходят в коде проекта vanya/old_project автоматически попадают в код petya/new_project.
Создать проект-алиас можно нажав на кнопку «Fork» и выбрав соответствующую опцию — если у вас достаточно прав, но вам предоставят на выбор возможность склонировать проект либо сделать ему алиас. Однако помните, что для создания алиаса необходимо иметь права не только на создание проектов в целевой группе, но и иметь права администратора в группе, к которой принадлежит исходный проект. Посмотреть список алиасов проекта можно на странице его свойств. При удалении одного из алиасов Git-репозиторий не удаляется, пока есть хотя бы один привязанный к нему проект.
Пользоваться этой новой возможностью надо с аккуратностью — ведь если забыть о существовании алиаса, то можно невзначай навредить соседнему проекту. Впрочем, предназначен новый функционал в первую очередь для разработчиков дистрибутивов (у которых порой возникает необходимость автоматически синхронизировать изменения в сотнях и даже тысячах проектов из разных платформ), и большинству пользователей вряд ли пригодится.
|
ROSA Fresh Desktop R5 LXDE
Представляем и LXDE-версию ROSA Desktop Fresh R5. LXDE, т.е. Lightweight X11 Desktop Environment, как следует из названия, один из самых популярных легких рабочих столов.
Под легкостью, в мире интерфейсов, имеются в виду:
- Мгновенная реакция системы на действия пользователя. Для этого в системе не должно быть потенциально «тормозных» компонентов, таких как интерпретаторы динамических языков со сборщиками памяти, все реализовано на системных языках и скомпилировано в машинный код, а все базовые компоненты системы — оконный менеджер, файловый навигатор, центр настроек, панели, меню и прочие элементы рабочего стола использовали одни и те же разделяемые компактные библиотеки.
- Простота концепций и интерфейса, тут тяжестью будет необходимый «груз знаний». Да, наверно самыми простыми можно назвать twm/fvmm, но если рассматривать интуитивную понятность, то тут выигрывают рабочие столы, схожие с Windows 95/XP, с нижней панелью и кнопкой «Пуск».
И LXDE — именно такая система.
- Использует легкий оконный менеджер OpenBox, в котором нет модных трехмерных эффектов, но который прекрасно работает без дискретной графической карты.
- Интерфейс схож с Windows 95/XP, и поэтому прекрасно подходит для пользователей, которым неинтересно ни изучать новые концепции рабочих столов (смущает даже «панель сверху» в стиле GNOME/MacOS), ни «настраивать» все под себя, как в KDE. Да, в KDE тоже можно все настроить в Windows-стиле, но также случайно, неопытный пользователь может «потерять» панель или нужные виджеты, что поставит его в тупик. Здесь же все стабильно и неизменно, как «при бабушке».

Некоторые, правда, считают, что время легких рабочих столов прошло — современные стандартные ноутбуки имеют многоядерные процессоры, многогигабайтную память и террабайтные винчестеры, да и экономия памяти и процессора программами рабочего стола вроде незаметна, на фоне браузера с сотней вкладок и графического редактора с десятком фотографий, не говоря уже о винчестере, забитом видеофайлами.
Но с другой стороны, прожорливость прикладных программ — тоже повод к экономичности системных компонент. И несмотря на удешевление обычных винчестеров, теперь «стандартом» для ноутбуков являются SSD-диски, гораздо меньших объемов и на порядок дороже обычных — и снова имеет смысл побороться за минимальный объем системного раздела.
А если учесть, что еще живы миллионы старых ноутбуков, одноядерные и с «догигабайтной» памятью, в которых сложно, или вообще невозможно увеличить память, и иногда диск… то для рабочего стола LXDE еще много лет найдутся благодарные пользователи.
Минусы, соответственно:
- Нет «модных плюшек» — 3D-эффектов и хитрой анимации в рабочем столе.
- Нет продвинутой системы индексации и поиска по документам
- Нет навороченной настройки рабочего стола — систем виджетов и расширений, простые настройки делаются старомодно, менюшками-настройками.
Также там не было привычной для пользователя «точки входа» для настройки системы, «центра управления», «контрольной панели», все было разбросано по отдельным утилитам. Мы сделали такой «Центр Управления», заодно реализовав для центра и дистрибутива в целом, «модный плоский метродизайн».
Соответственно, можно рекомендовать этот дистрибутив:
- Для владельцев слабых конфигураций — старых десктопов и ноутбуков, или наоборот, относительно современных экономичных нетбуков.
- Для тех, кто «пересаживается» с Windows 95/XP/7, и сильно привык к классическому рабочему столу с нижней панелью. Вот, кстати, пример, как наш LXDE-дистрибутив рекомендуют на массовом развлекательном ресурсе, как «первый Linux» для Windows-пользователей.
- Кстати, наши дистрибутивы хорошо подходят «на попробовать» в VirtualBox, есть из коробки «VirtualBox additions» для автонастройки экрана, общего буфера обмена и разделяемых папок.
ROSA Fresh — это современная отечественная операционная система на основе GNU Linux, создаваемая сообществом и легально доступная всем желающим совершенно бесплатно и без регистрации. Исходные коды системы публикуются согласно лицензии GPL в собственной системе сборки ROSA — ABF. ROSA Fresh предназначена прежде всего для начинающих пользователей Linux. Она представляет собой готовое решение типовых задач домашнего пользователя:
- Просмотр интернет-страниц
- Создание текстовых документов, электронных таблиц и презентаций
- Просмотр видеофайлов и прослушивание музыки, в том числе онлайн
- Редактирование графических файлов, аудио- и видеозаписей
После установки система сразу готова к работе, а для ее настройки не требуются специальные знания.
Репозитории ROSA Fresh — одни из самых богатых, в них можно найти тысячи программ для решения самых разных задач.
Линейка ROSA Fresh разрабатывается с 2013 года и обновляется в соответствии с политикой выпуска.
Впрочем, всегда можно добавить в систему и рабочий стол KDE (установив пакет «task-kde»), и GNOME Shell (установив «task-gnome»).
- Скачать дистрибутив можно здесь
- Минимальные системные требования
- 256 Мб ОЗУ (рекомендуемый объем — 512 Мб, для режима Live рекомендуется 384 Мб).
- Место на жёстком диске: 6 Гб HDD
- Процессор: Pentium4/Celeron
Все базовые компоненты системы такие же, как в наших дистрибутивах ROSA Fresh KDE и ROSA Fresh GNOME. Соответственно, все доработки системного плана автоматически попадают и в LXDE-дистрибутив.
По сравнению с прошлым релизом, появились
- загрузка в Secureboot-режиме, и множество других улучшений загрузчика.
- обновленные версии ядра, библиотек MESA и X11, графических драйверов NVidia и AMD, и прикладного софта.
- автоматическое выполнение TRIM для SSD (запускается раз в неделю), пакет ssd-utils включен в дистрибутив.
- добавлена поддержка систем с гибридной графикой Intel+AMD, новые версии XFdrake.
Конкретно LXDE-специфичных доработок немного:
- Добавили индикатор батареи и управление питанием из xfce;
- Исправлен ряд ошибок (включая баг ROMP с воспроизведением файлов с русскими именами).
Дистрибутив основан на платформе rosa2014.1 со сроком поддержки 2 года (до осени 2016 года), и регулярно будут выпускаться и обновления, и новые релизы. Если у вас уже установлен ROSA Fresh LXDE R4, то ничего переставлять не нужно, все обновления приедут сами. Если у вас до сих пор более старый дистрибутив, привязанный к платформе 2012, то нужно сделать несложную миграцию, переподключив репозитории к новой платформе и обновив систему.
И разумеется, мы ждем от вас фидбека, багов и пожеланий в любом виде (кроме «невидимого» ворчания в своих блогах — отслеживать все это достаточно сложно, так что сбрасывайте свои обзоры и жалобы куда-нибудь, где мы их заметим).
У нас есть группы в Facebook и VK. В Google Plus у нас есть и недавно заведенная официальная страница компании и небольшое сообщество.
Есть форум, на котором не только доброжелательные пользователи, но и постоянно дежурят наши разработчики и тестировщики.
Ну и для совсем опытных и бесстрашных — классическая багзилла, ставьте баги прямо по этой ссылке.
Однако в будущем мы планируем заменить LXDE-дистрибутив на LXQT. Дело в том, что команды, производящие два самых популярных легковесных рабочих стола — LXDE и RazorQT, объединились в работе над новым проектом — LXQt, по сути, в основном это будет старый добрый LXDE, переписанный с фреймворка GTK на QT.
LXDE правда будет продолжать поддерживаться отдельным энтузиастом, но вектор развития будет уже однозначно на LXQt, который можно попробовать уже сейчас, если установить пакет «task-lxqt» из наших репозиториев.

Да, он еще сыроват, там нужно много локализации, конфигурации меню и панели, там совсем другие стили, и есть уже готовый «центр управления» — придется забросить наш «плоский LXDE-дизайн», и наш LXDE-центр управления. Но, наверно, это неизбежная плата за прогресс, к тому же вроде мы не заметили ярых фанатов нашего дизайна LXDE.
Впрочем, спросим:
Как вы относитесь к переходу с LXDE на LXQT?
|
И да — это не сильно интересная новость, с точки зрения Linux-фанатов, поэтому не стоит ее выкладывать на opennet-ЛОР, вряд ли там будут конструктивные комментарии.